In diesem Blogbeitrag geht es um ein spezielles „Composite Pattern“ (zusammengesetztes Muster). Es ermöglicht uns, mit einer Hierarchie von Objekten (wie einer n-Baumstruktur) auf einheitliche Weise zu arbeiten. Durch die Entwicklung eines Tree-Nodes, der Betriebsmodi ausführen und eine beliebige Anzahl von Child-Nodes verwalten kann, können wir alle Baumelemente in einem Aufruf durchlaufen.
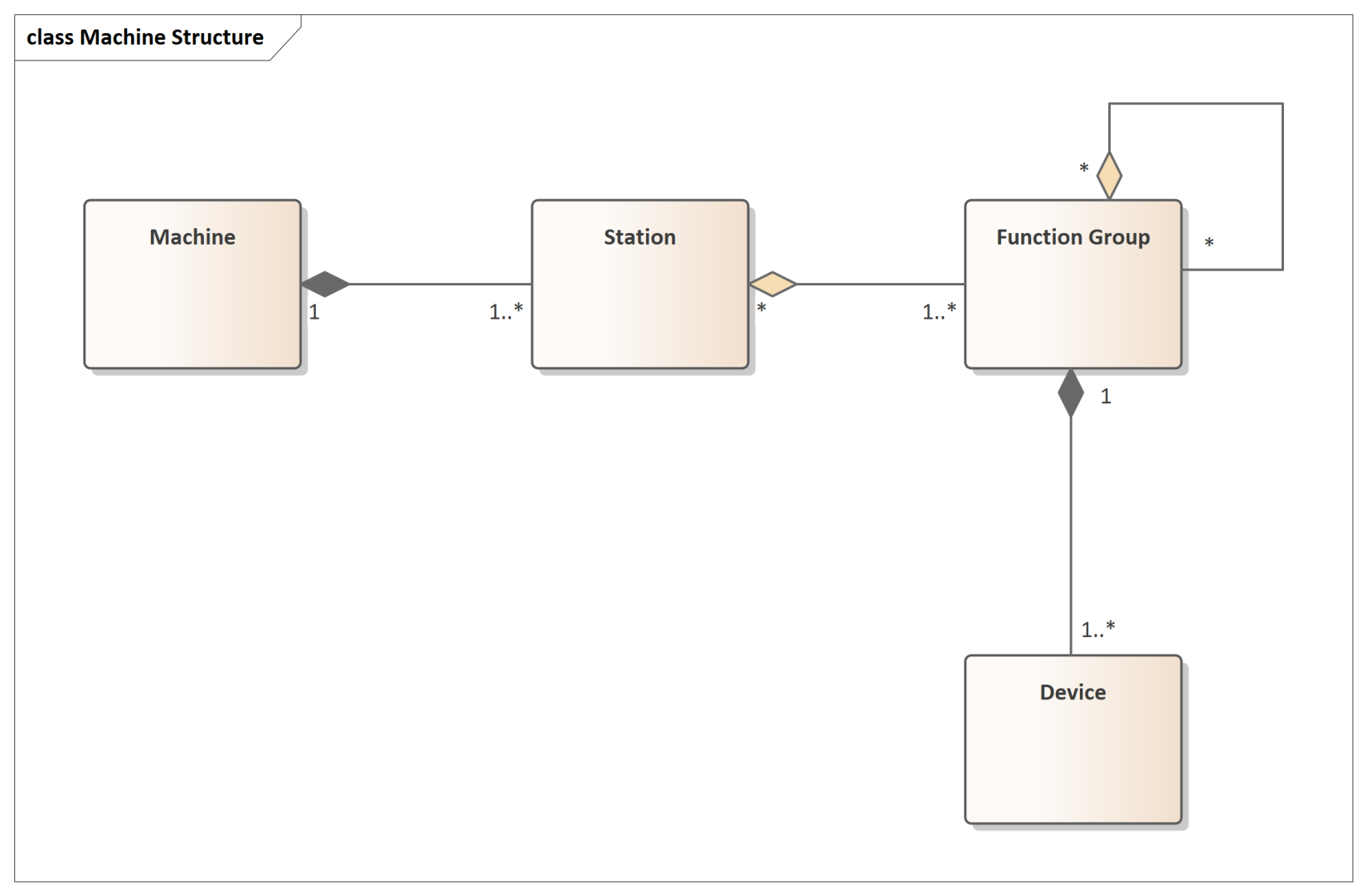
Die Maschinen, die wir programmieren, haben alle eine hierarchische Struktur (siehe Abbildung 1).